grounding
robotics research AI startups grounding fail robot epistemology grounding
what is ‘grounding’ and why is it important
Over the last few years I have picked up more and more on the term grounding to talk about a robot’s knowledge of the physical world and especially for identifying grounding fails as they occur in my own robot experiments, personal experience of the technicized world, or through the news.
Grounding is related to the symbol grounding problem (SGP) in AI, which you might be familiar with. Especially in good old-fashioned AI, reasoning is often modeled as inference over mental symbols. The symbols represent outside objects, their relations to other objects, or other environmental states. Now, the symbol grounding problem occurs when you ask to what extent, and how precisely any such symbol is grounded in, aka connected to, the raw sensorimotor data. The raw sensorimotor data is a multidimensional stream of noisy data impinging on the robot via the entirety of its sensors.
The grounding should be a complete description of how sensor values change symbol states and how sensor values can be predicted from symbol states. If a symbol’s grounding is even only slightly off, this might be amplified during inference, producing potentially large and disastrous errors when the inference is being committed to, aka sent to the motors and an action is performed.
Depending on your philosophical stance you might disagree but raw sensorimotor data is the only source of information available to an organism in any given moment, apart from the phylogenetic information it carries. Introducing symbols into robots where the symbols are taken from introspection into human mental activity creates large risk to end up with dangling symbols and associated downstream effects. Introspection is very limited in what brain processes it can actually access. This issue has crucial relevance for the trustworthiness of a robot.
grounding fails
What happens if the grounding is bad and a grounding fail occurs?
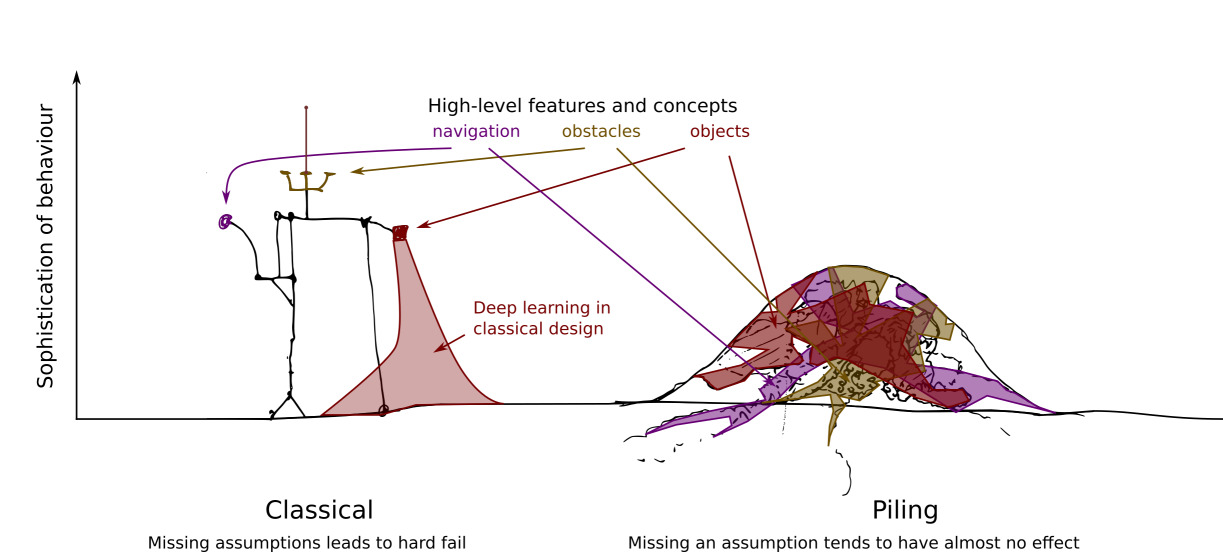
Many systems being built which surround us and shape our lives are usually designed according to a natural language specification which is known to be ambigous. Then engineering kicks in to solve each point of the spec. If the project is framed in narrow terms (Kahneman), it is likely that a solution is created that fits the spec but does so in a fragile way that relies on assumptions that often do not hold. The situation is illustrated in the picture below.
A premium grounding fail is the story of Alexa ordering an expensive dollhouse in interaction with a kid playing dolls at home (Alexa, order me the nicest dollhouse you know). This story made it onto a radio news broadcast. During the live broadcast the scenario was acted out and a few hundred Alexa’s that listened to the radio show went on to order the same dollhouse again (TODO: citation needed).
The fail here is that Alexa pretends to understand spoken human language but in a fundamental way it doesn’t. My favorite term here is /preverbal/ auditory skills. Preverbal means things related to the general acoustic setting which we constantly compute, such as general acoustic activity; presence and location of sound sources; intermodal cues from vision, smell, memory; tonus of a speakin voice; variability of a speaking voice; and so. These properties allow to distinguish fundamentally between different types of sound sources and we expect them to be mastered before we even begin to speak ourselves.
List of funny and serious examples
- Janelle Shane’s supernice blog on https://aiweirdness.com is full of this
- Alexa doll house incident, radio runaway / replay attack, https://www.theverge.com/2017/1/7/14200210/amazon-alexa-tech-news-anchor-order-dollhouse
- Accidental recording and leak of couple arguing to random addressbook contact, https://www.theguardian.com/technology/2018/may/24/amazon-alexa-recorded-conversation
- new scientist: adversarial foo: https://twitter.com/newscientist/status/1122794657568698369
- AI hallucination problem: pareidolia: face in the street: https://www.wired.com/story/ai-has-a-hallucination-problem-thats-proving-tough-to-fix/, https://en.wikipedia.org/wiki/Pareidolia
- steganographic audio attacks to voice recognition
- Darling: mobile office printer falling off the stairs
- Darling: Elon Musk conceding to problems in attaining desired scope of automation in tesla factory
- Chess robot in Moscow pinches and breaks finger of seven year old, twitter opt?
- ** DONE posts: chess robot breaks finger of seven year old <2022-08-10 Mi>
- 2020 first year a human got killed by a fully autonomous drone, twitter opt?
- feed: robotics: fails: drone lands on power lines https://twitter.com/BotJunkie/status/1575704353536868352, https://www.abc.net.au/news/2022-09-30/food-delivery-drone-lands-on-power-lines-qld-browns-plains/101489670
- feed: AI: fail: https://spectrum.ieee.org/machine-learningbackdoor
- feed: AI: fail: https://spectrum.ieee.org/artificial-intelligence-in-government
- feed: tech: fail: https://spectrum.ieee.org/can-you-trust-nist
pile of sheets
The proposal is to build these systems as piles of sheets. This approach leads to a thickly interwoven structure that has very favorable properties when sheets or groups of them fail. It is a visual and metaphorical proposal but just as serious and we’re out to do it.
Each sheet can be thought of as a computational module, that has some function and some capacity for adaptation. It solves some small part in the large job of translating all raw sensory information to a consistent high level state as it is perceived in conscious experience. The high level is reached by piling thousand of sheets on top of each other with higher level concepts represent by sheets higher up in the pile.
Now if we fail and pull out one or more of these sheets from the pile, nothing really happens. There will only be small readjustment to a new equilibrium under the gravitational pull of unexplanation.
- TODO: Explain proprioceptive grounding and force gauging
- TODO: Explain nonintuitive decompositions
- TODO: Q: Is intuition the same as introspection? Does intuitive mean recognizable by means of introspection?
Comments
tag cloud
robotics music AI books research psychology intelligence feed ethology computational startups sound jcl brain audio organization motivation models micro management jetpack funding dsp testing test synthesis sonfication smp scope risk principles network musician motion mapping language gt fail exploration evolution epistemology digital decision datadriven culture computing computer-music complexity algorithms ai aesthetics action wayfinding visualization tools thinking theory temporal sustainability supercollider stuff sonic-art sonic-ambience society slop signal-processing self score robots robot-learning robot python pxp priors predictive policy policies philosophy perception organization-of-behavior open-world open-culture neuroscience networking navigation movies minecraft midi message-passing measures math locomotion llms linux learning kpi internet init health hacker growth grounding graphical generative gaming games explanation event-representation embedding economy economics discrete development definitions cyberspace criticism creativity computer compmus cognition coding-agents business birds biology bio-inspiration benchmarks android agents